Внутри Глобус ИНК: механический навигационный компьютер для советского космического полета, 25 фото и текст
- В советской космической программе использовались совершенно другие органы управления и приборы, чем у американских космических кораблей. Одним из самых интересных навигационных приборов на борту космического корабля «Союз» был «Глобус», который использовал вращающийся земной шар для обозначения положения космического корабля над Землей. Этот навигационный прибор представлял собой электромеханический аналоговый компьютер, который использовал сложную систему зубчатых колес, кулачков и дифференциалов для вычисления положения космического корабля. Официально прибор назывался «космический навигационный индикатор» с аббревиатурой ИНК, но я буду использовать более описательное прозвище «Глобус».
Космический навигационный индикатор ИНК-2 С "Глобус"
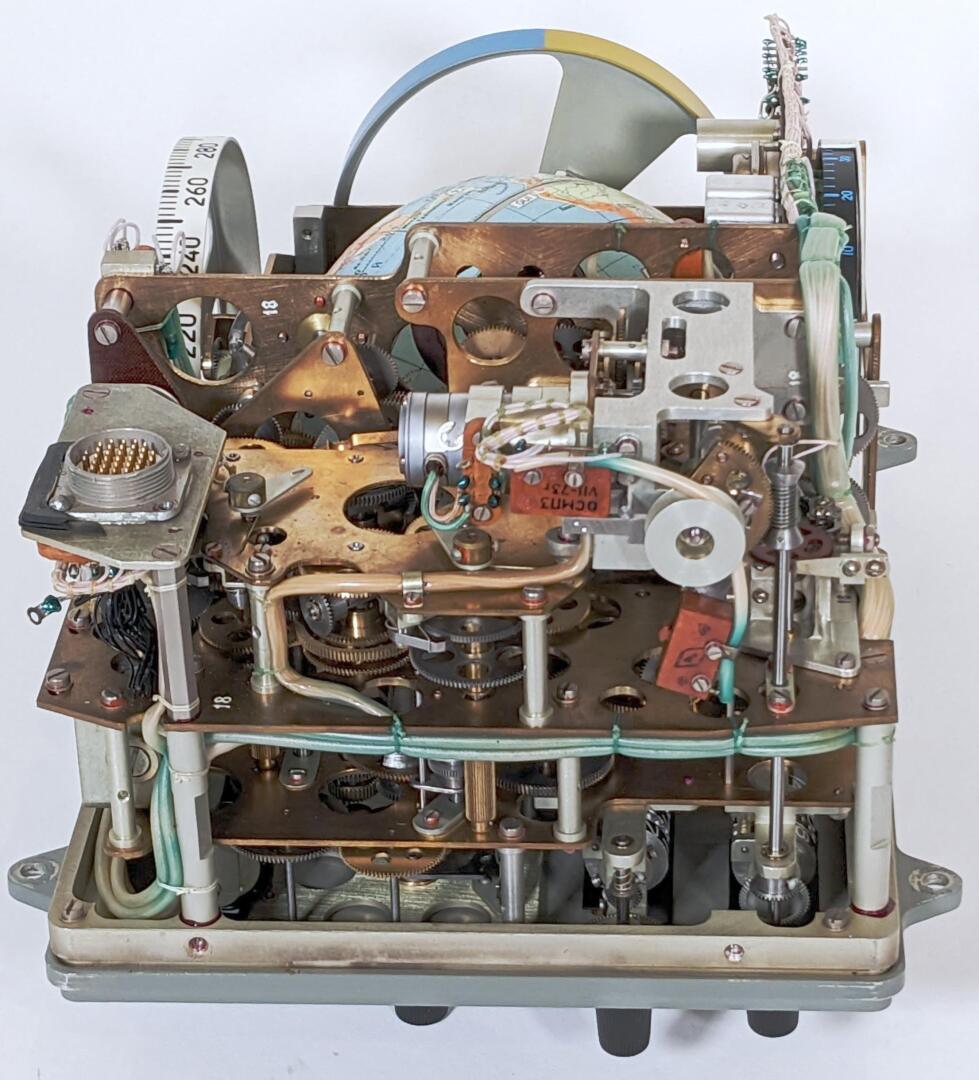
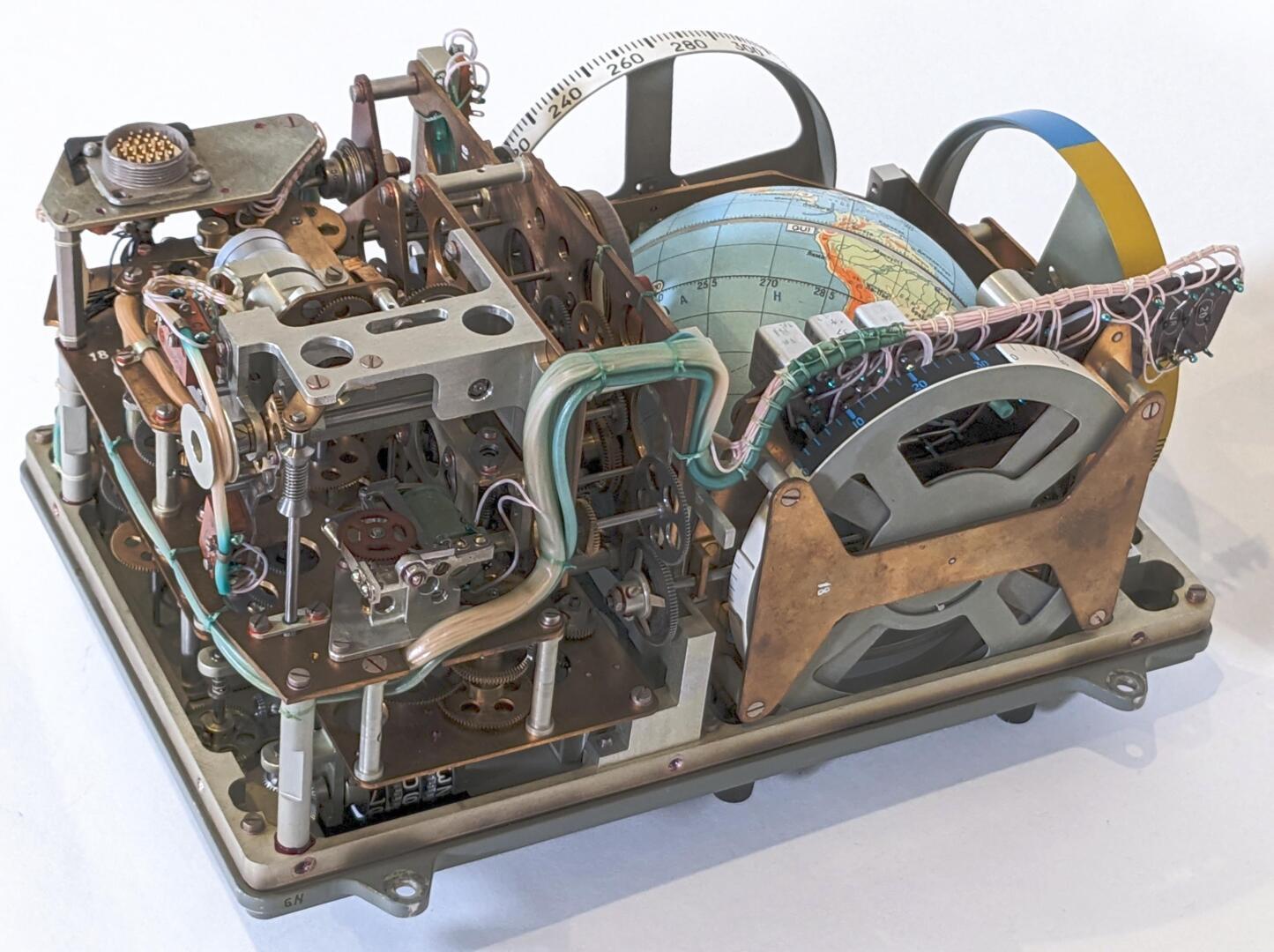
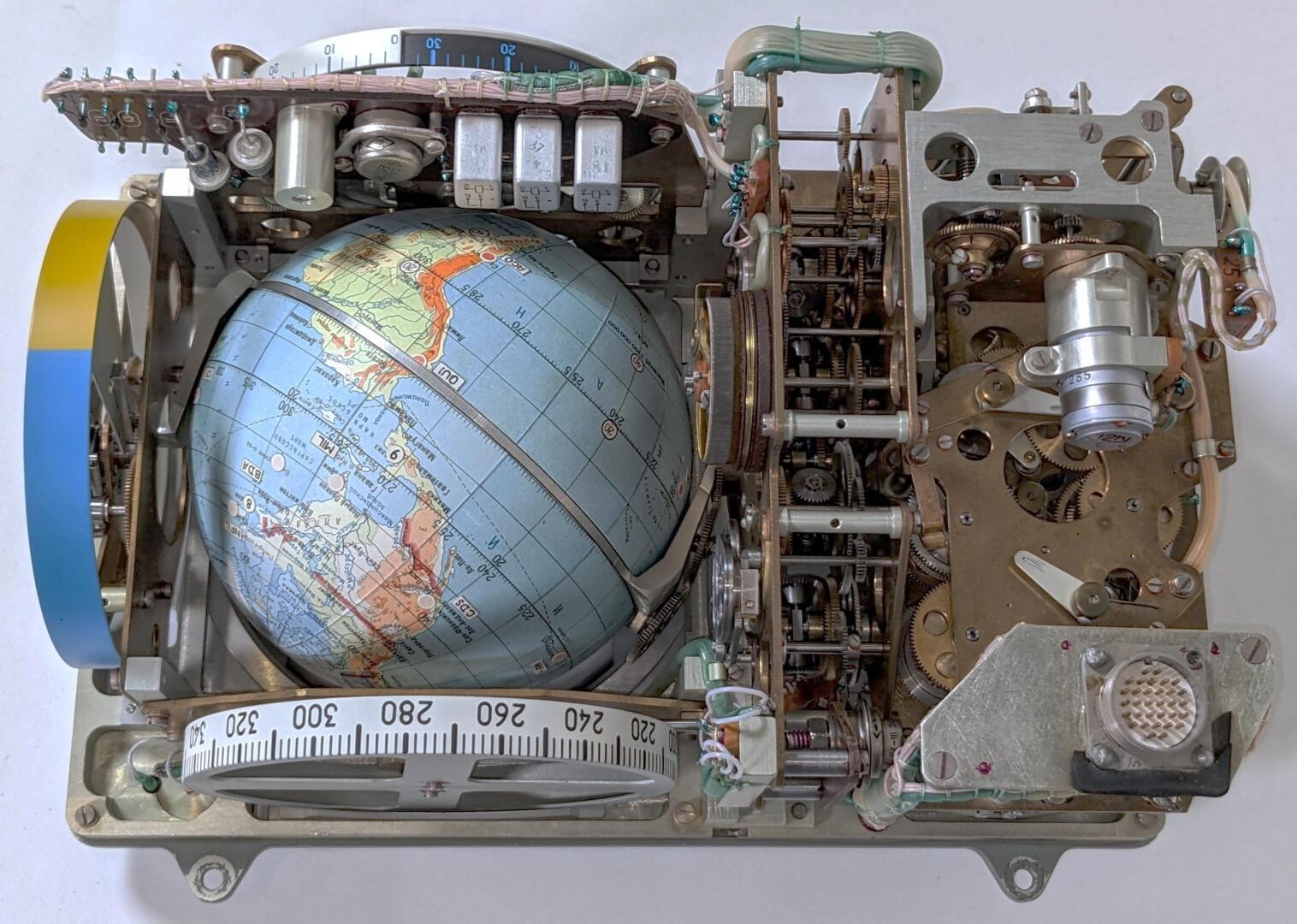
- Недавно мы получили Глобус от коллекционера и открыли его для ремонта и реверс-инжиниринга. В этом сообщении в блоге я объясню, как он работает, покажу его внутренние механизмы и опишу, что я узнал из реверс-инжиниринга. Фотография ниже дает представление о механической сложности этого устройства, которое также имеет несколько реле, соленоидов и других электрических компонентов.
Глобус ИНК, вид сбоку.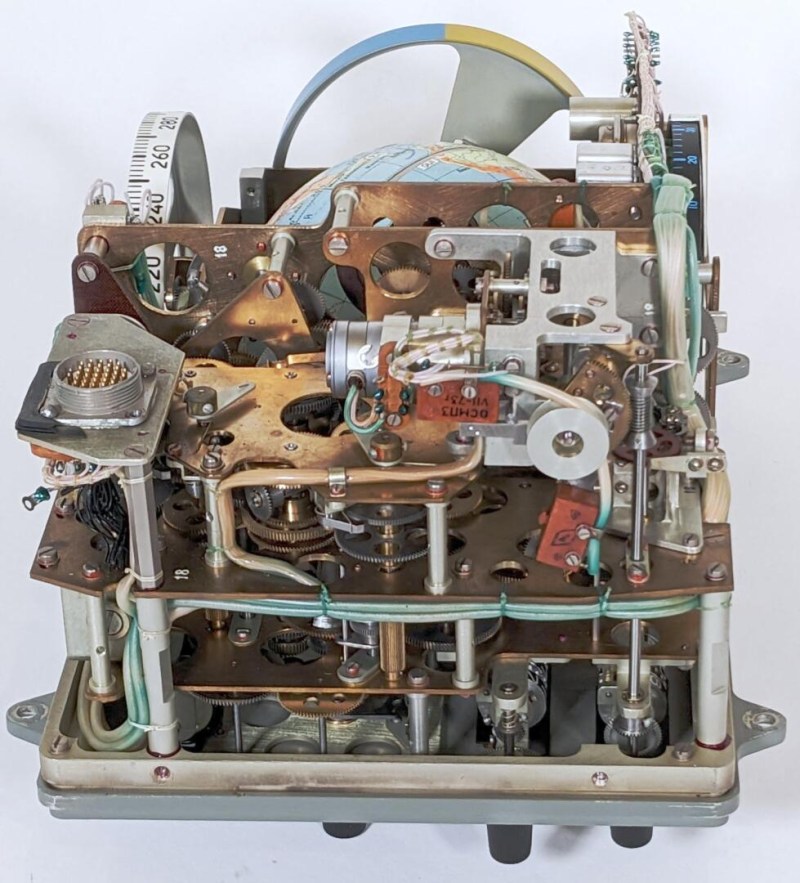
- Функциональность
Основная цель Глобуса состояла в том, чтобы указать положение космического корабля. Глобус вращался, а фиксированное перекрестие на пластиковом куполе указывало положение космического корабля. Таким образом, глобус совпал с видом Земли космонавтов, что позволило им подтвердить свое местоположение. Циферблаты широты и долготы рядом с земным шаром давали числовое указание местоположения. Между тем, шкала света/тени внизу показывала, когда космический корабль будет освещен солнцем или в тени, что является важной информацией для стыковки. У Глобуса также был счетчик орбит, показывающий количество витков.
У Глобуса был второй режим, указывающий, где приземлится космический корабль, если они запустят тормозные двигатели, чтобы начать посадку. Щелчок переключателя заставлял земной шар вращаться до тех пор, пока место посадки не оказалось под перекрестием прицела, и космонавты могли оценить пригодность этого места для посадки.
Космонавты настроили «Глобус», поворачивая ручки, чтобы установить начальное положение космического корабля и период обращения. Оттуда «Глобус» электромеханически отслеживал орбиту. В отличие от управляющего компьютера Apollo, Глобус не получал навигационную информацию от инерциального измерительного блока или других источников, поэтому он не знал реального положения космического корабля. Это было просто отображение предсказанного положения.
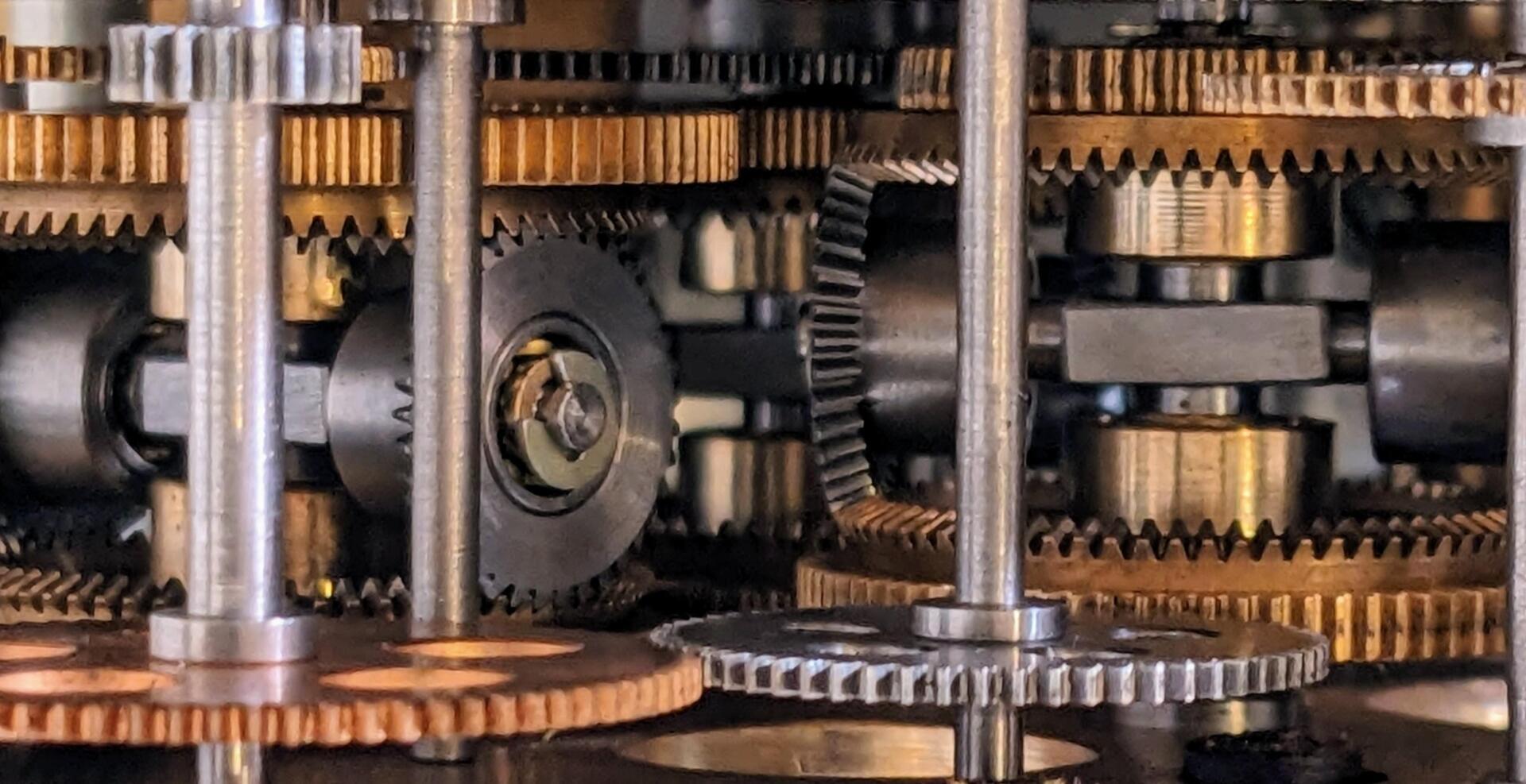
Крупный план сложных зубчатых передач в «Глобусе».
- Глобус
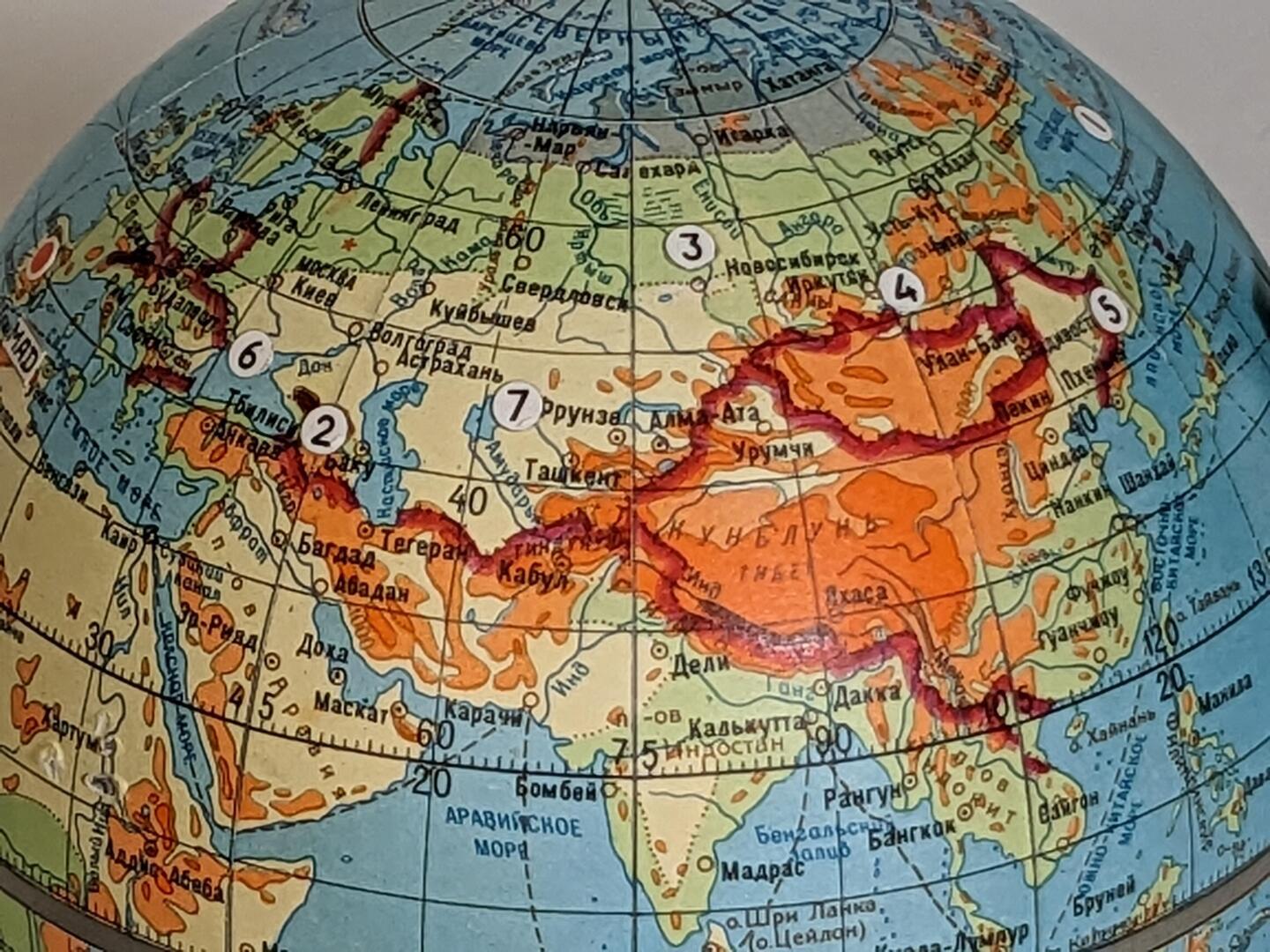
Сам земной шар детализирован из-за его небольшого размера, на нем показаны такие особенности местности, как горы, озера и реки. Эти особенности на карте помогли космонавтам сравнить свое положение с географическими объектами, которые они могли видеть на Земле. Эти особенности также были важны для выбора места посадки, чтобы они могли видеть, на какую местность они будут приземляться. По большей части карта не показывает политических границ, за исключением толстых красных и фиолетовых линий. Эта линия показывает границы СССР, а также границы между коммунистическими и некоммунистическими странами, что также важно для выбора места посадки. На земном шаре также пронумерованы круги от 1 до 8, которые обозначают радиостанции для связи с космическим кораблем, что позволяет космонавтам определять, с какими наземными станциями можно связаться.
Вид на земной шар, показывающий Азию.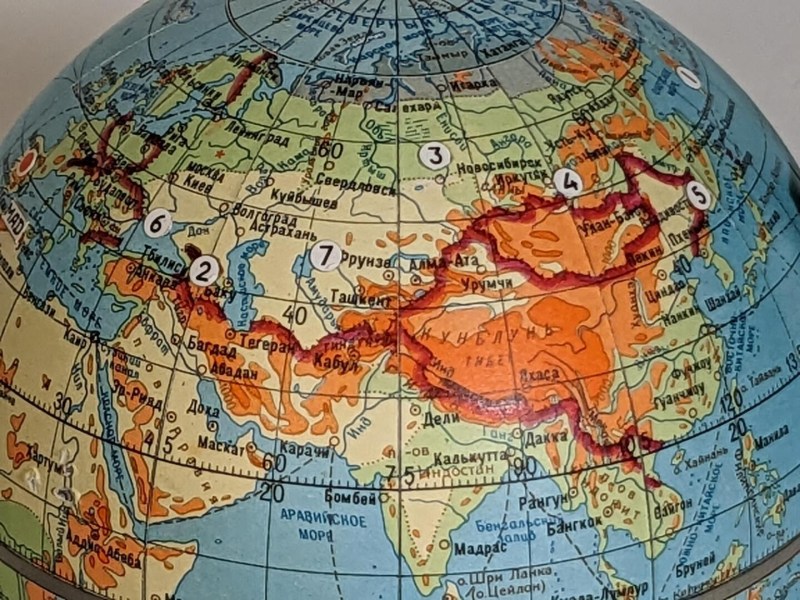
- Контроль над земным шаром
Увидев Глобус, можно задаться вопросом, как вращается земной шар. Может показаться, что земной шар должен быть свободно плавающим, чтобы он мог вращаться вокруг двух осей. Вместо этого умный механизм прикрепляет глобус к устройству. Суть в том, что экватор земного шара представляет собой цельный кусок металла, который вращается вокруг горизонтальной оси устройства. Второй зубчатый механизм внутри земного шара вращает земной шар вокруг оси север-юг. Два вращения контролируются концентрическими валами, прикрепленными к блоку, что обеспечивает две степени свободы вращения через фиксированные валы.
На фото ниже показана рамка, которая держит и управляет земным шаром. Пунктирная ось закреплена в блоке горизонтально, а вращение осуществляется через две шестерни слева. Одна шестерня вращает земной шар и раму вокруг пунктирной оси, а зубчатая передача заставляет земной шар вращаться вокруг вертикальной полярной оси (в то время как экватор остается неподвижным).
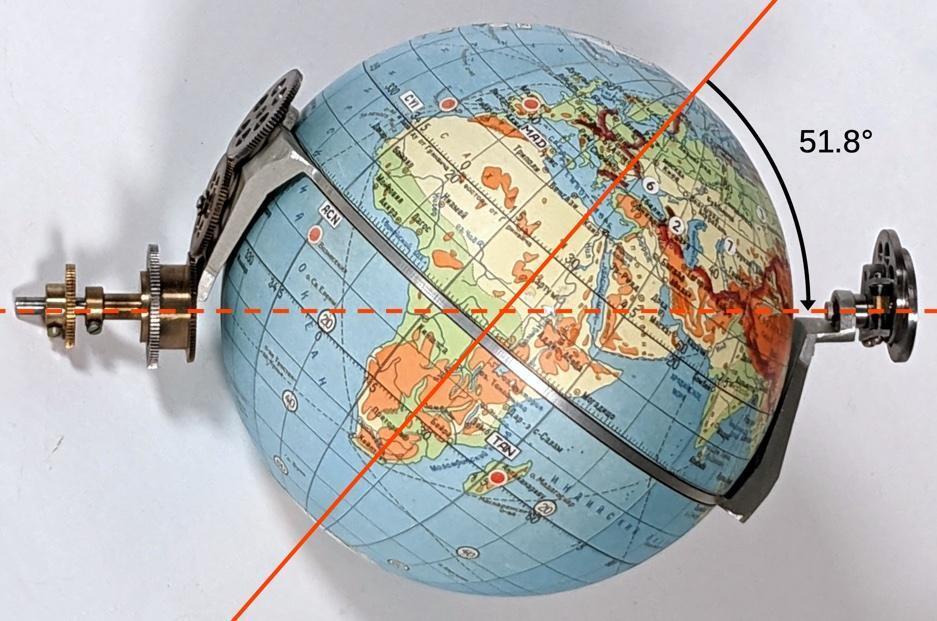
Ось земного шара находится под углом 51,8 °, чтобы поддерживать это наклонение орбиты.
- Угол сверху составляет 51,8°, что очень важно: это наклонение стандартной орбиты «Союза». В результате простое вращение земного шара вокруг пунктирной линии приводит к тому, что перекрестие движется по стандартной орбите. 2 Вращение двух половин земного шара вокруг полюсов дает разные орбиты 51,8° над поверхностью Земли при вращении Земли. (Почему 51,8 градуса? Космодром Байконур, точка запуска «Союза», находится на 45,97° северной широты, поэтому 45,97° будет наиболее эффективным наклоном. Север, в результате чего получается 51,8 °.
Одним из важных следствий этой конструкции является то, что наклонение орбиты фиксируется механизмом угла наклона земного шара. Для разных орбит нужно было построить разные блоки Глобус. Более того, эта конструкция работает только с круговыми орбитами, что делает ее бесполезной во время изменений орбиты, таких как рандеву и стыковка. Это были настолько существенные ограничения, что некоторые космонавты хотели убрать «Глобус» с пульта управления, но он оставался до тех пор, пока в «Союзе-ТМА» (2002 г.) его не заменили компьютерным дисплеем.
Этот «Глобус» явно пострадал. На задней части корпуса были большие вмятины. Что еще более важно, вал земного шара был выбит из своего надлежащего положения и больше не зацеплялся с шестернями. Это также нанесло удар по Африке, где земной шар задел внутренние компоненты. К счастью, Марку удалось вернуть земной шар в нужное положение, обеспечив при этом правильное время переключения передач на шестерни.
Крупный план шестерен, приводящих в движение две половины земного шара вокруг полярной оси, оставляя экватор неподвижным.
Крупный план шестерен, приводящих в движение две половины земного шара вокруг полярной оси, оставляя экватор неподвижным.
- Орбитальная скорость и «конус»
Орбитальный полет «Союза» занимает примерно 90 минут, но время зависит от высоты. Глобус имеет регулировочную ручку (ниже) для настройки периода обращения в минутах, десятых и сотых долях минут. Внешняя ручка имеет три положения и указывает на цифру, которая изменяется при повороте внутренней ручки. Механизм обеспечивает регулировку ±5 минут от номинального периода 91,85 минуты.
Элемент управления для регулировки орбитального периода.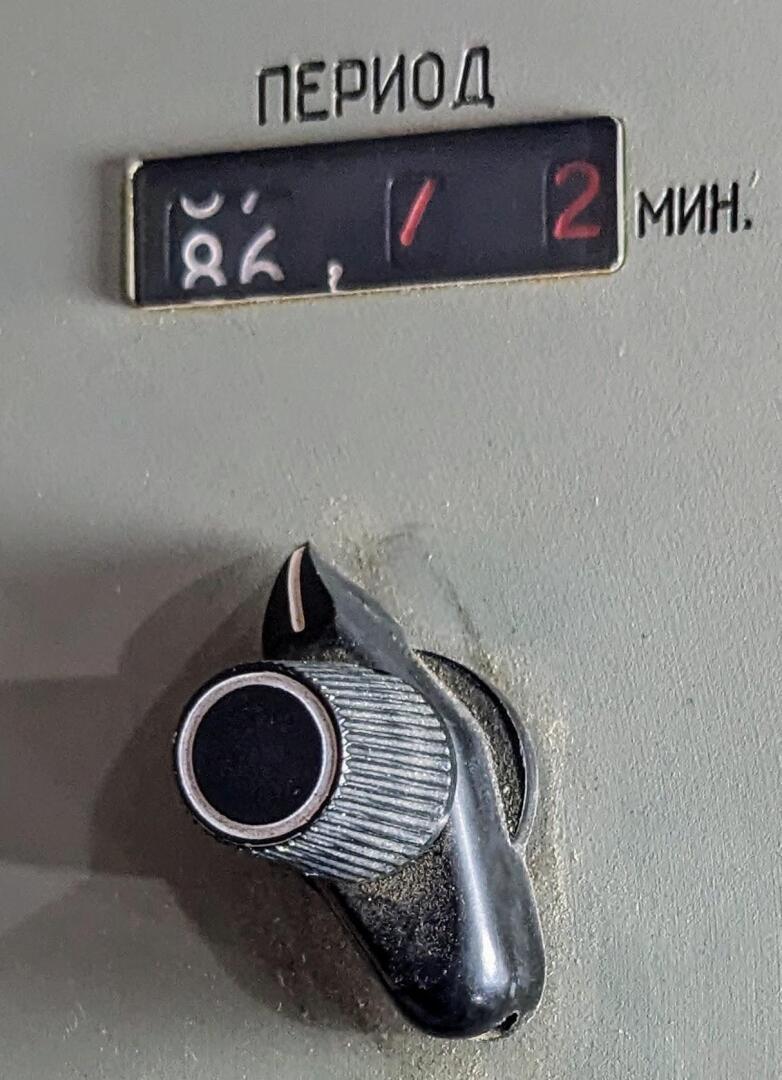
- Функция орбитальной скорости реализуется за счет увеличения или уменьшения скорости, с которой земной шар вращается вокруг орбитальной (горизонтальной) оси. Генерация переменной скорости сложна, поскольку Глобус работает на фиксированных импульсах с частотой 1 Гц. Решение состоит в том, чтобы начать с базовой скорости, а затем добавить три шага: один для настройки минут, один для настройки десятых минут и один для настройки сотых минут. Эти четыре скорости складываются (как скорости вращения вала) с получением общей скорости вращения.
В Глобус используются многочисленные дифференциальные передачи для увеличения или уменьшения числа оборотов. На фото ниже показаны два набора шестерен дифференциала, расположенные рядом.
Два дифференциала в Глобусе.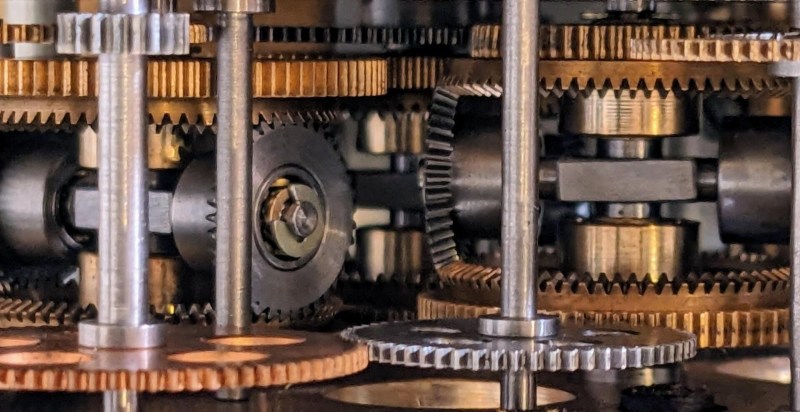
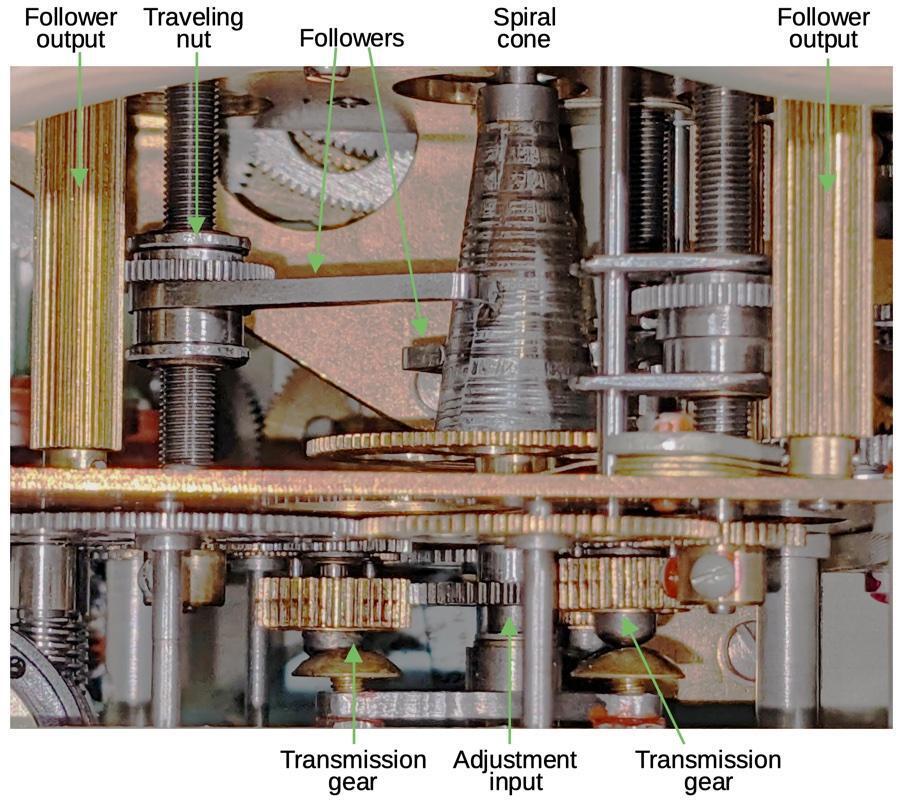
- Проблема заключается в том, как сгенерировать эти три переменные скорости вращения из фиксированного ввода. Решением является специальный кулачок, имеющий форму конуса со спиралевидным поперечным сечением. На кулачке движутся три толкателя, поэтому при вращении кулачка толкатель выталкивается наружу и вращается на своем валу. Если толкатель находится рядом с узкой частью кулачка, он перемещается на небольшое расстояние и имеет небольшой поворот. Но если толкатель находится рядом с широкой частью кулачка, он перемещается на большее расстояние и имеет большее вращение. Таким образом, перемещая толкатель в определенную точку на кулачке, выбирают скорость вращения толкателя.
Очевидно, что камера не может вращаться вечно. Вместо этого в конце одного оборота его поперечное сечение резко уменьшается до начального диаметра. Это приводит к тому, что ведомый возвращается в исходное положение. Чтобы предотвратить рывок земного шара назад, толкатель соединен с дифференциальной передачей через фрикционную муфту и храповик. Таким образом, когда толкатель возвращается назад, храповик удерживает приводной вал в неподвижном состоянии. Затем приводной вал продолжает свое вращение, а толкатель снова начинает вращаться. Таким образом, на выходе получается (в основном) плавное вращение со скоростью, зависящей от положения толкателя.
Схема, показывающая механизм управления орбитальной скоростью. У конуса три последователя, но с этого ракурса видны только два. Шестерни «трансмиссии» перемещаются вперед и назад с помощью внешней ручки, чтобы выбрать, какой толкатель регулируется внутренней ручкой.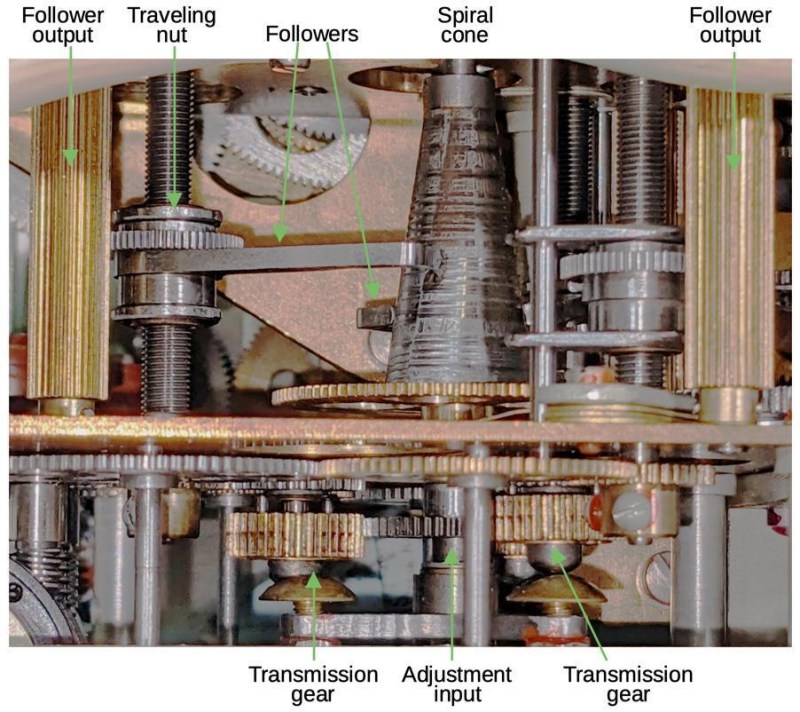
- Широта и долгота
Индикаторы слева и сверху земного шара указывают широту и долготу космического корабля соответственно. Они определяются удивительно сложными функциями, генерируемыми проекцией орбиты на земной шар.
Функции широты и долготы реализованы в форме металлических кулачков; на фото ниже показан механизм долготы. Каждая функция имеет два кулачка: один кулачок выполняет желаемую функцию, а другой кулачок имеет «противоположную» форму для поддержания натяжения челюстного механизма слежения.
Кулачок широты приводит в движение шкалу широты, заставляя ее колебаться между 51,8 ° северной широты и 51,8 ° южной широты. Долгота сложнее, потому что вращение Земли заставляет ее постоянно меняться. Выходная долгота на циферблате создается путем добавления значения кулачка к вращению Земли через дифференциальную передачу.
Кулачковый механизм для вычисления долготы.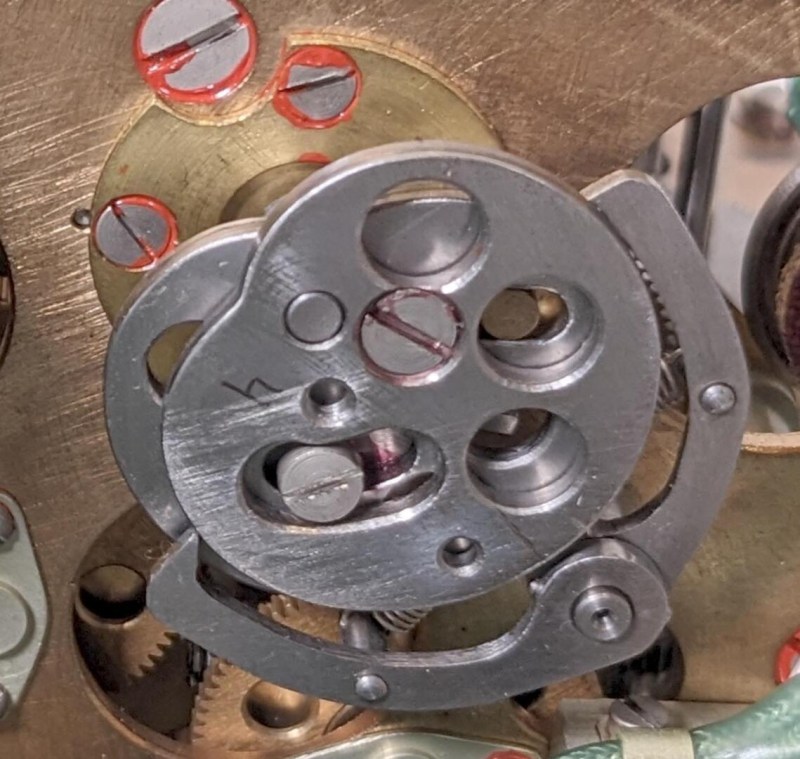
- Свет и тень
У «Глобуса» есть индикатор, показывающий, когда космический корабль войдет в свет или тень. Циферблат состоит из двух концентрических циферблатов, сконфигурированных двумя ручками. Эти циферблаты движутся по орбите космического корабля, а красная легенда остается неподвижной. Я думаю, что эти циферблаты приспособлены к циферблату долготы, но я все еще исследую.
Индикатор света и тени управляется двумя ручками.
- Механизм посадочного места
«Глобус» может показать, где приземлился бы космический корабль, если бы вы начали вход в атмосферу сейчас, с точностью до 150 км. Это вычисляется путем проецирования текущей орбиты вперед на частичную орбиту, в зависимости от того, сколько времени потребуется для приземления. Космонавт указывает это значение «посадочным углом», который указывает на эту часть орбиты как на угол. Электролюминесцентный индикатор в верхнем левом углу устройства показывает место посадки.
Контроль угла посадки.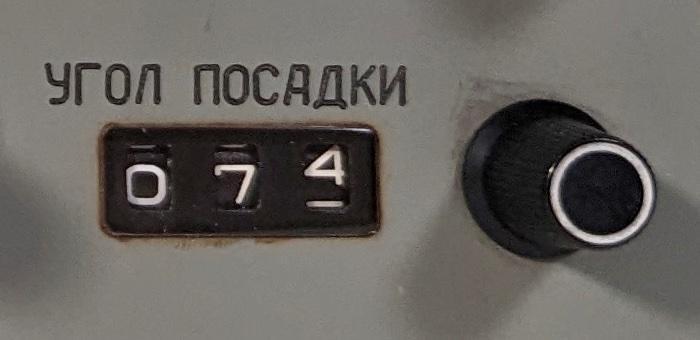
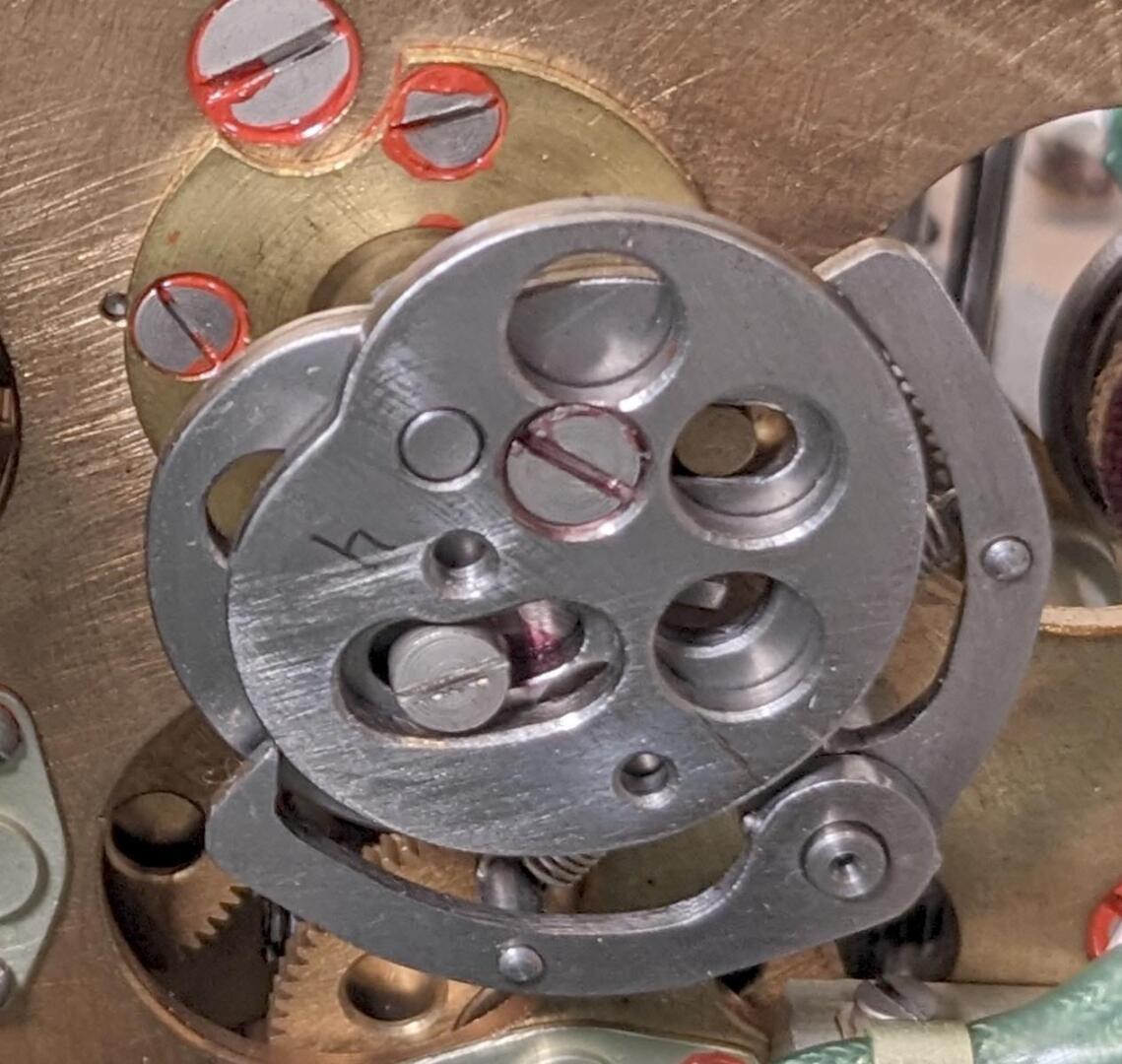
- Чтобы получить положение приземления, двигатель вращает глобус до тех пор, пока он не остановится после поворота на заданный угол. Механизм реализации этого показан ниже. Ручка регулировки на панели поворачивает регулировочный вал, который перемещает концевой выключатель на нужный угол с помощью червячной передачи. Проводка оборачивается вокруг колеса, поэтому проводка остается под контролем во время этого движения. Когда приводной двигатель активируется, он одновременно вращает шар и поворотный рычаг. Поскольку двигатель останавливается, когда поворотный рычаг касается концевого выключателя угла, земной шар поворачивается на желаемый угол. Фиксированный концевой выключатель используется для возврата положения земного шара в его обычное орбитальное положение.
Функция угла посадки использует сложный механизм.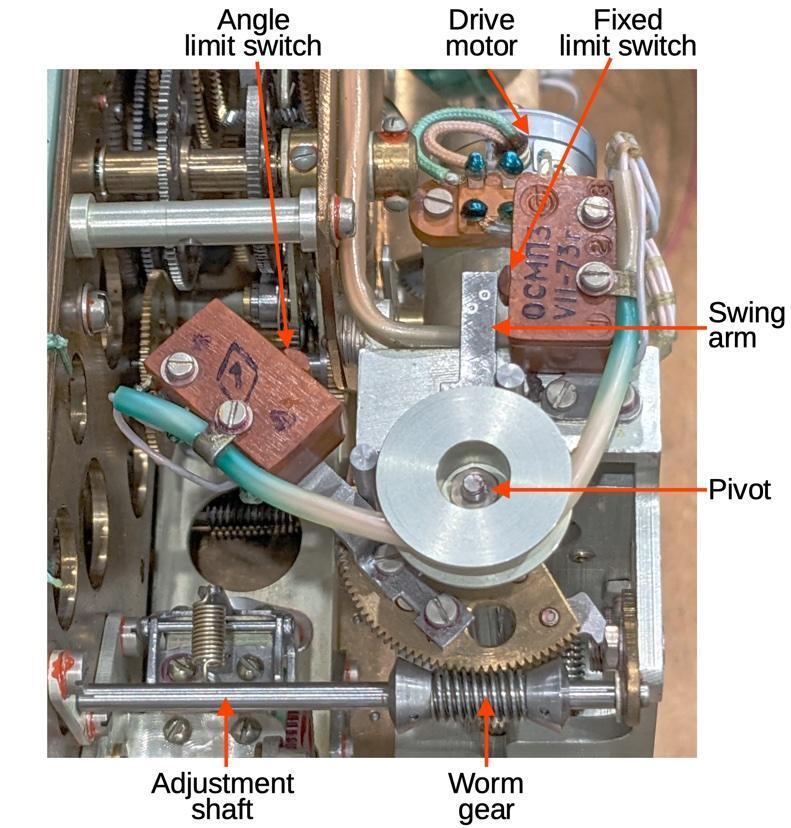
- Режим места посадки активируется трехпозиционным поворотным переключателем. Первая позиция «МП» (место посадки) выбирает место посадки, вторая позиция «З» (Земля) показывает положение над Землей, а третья позиция «Откл» отменяет угол посадки. Вращения и выключает механизм.
Поворотный переключатель для выбора режима.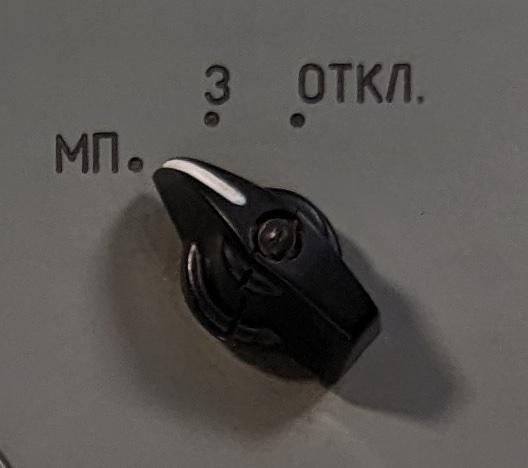
- Электроника
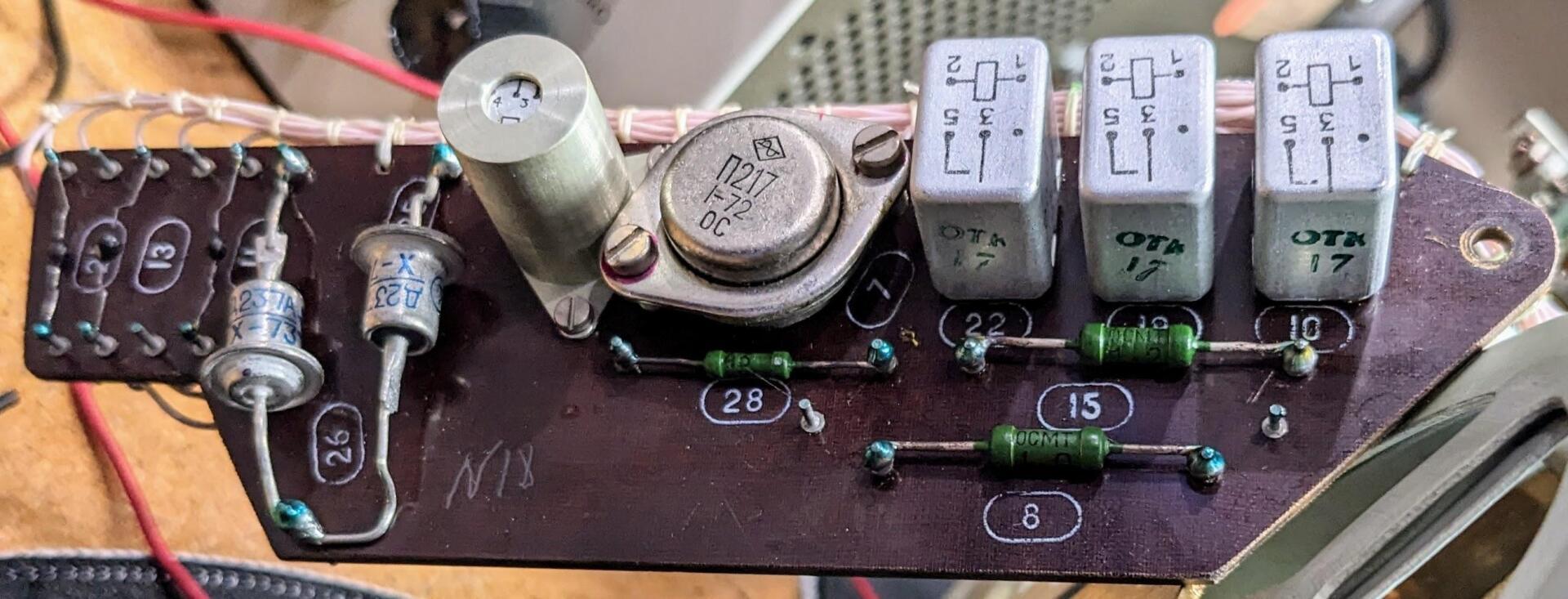
Хотя Глобус в основном механический, он имеет электронную плату с четырьмя реле и транзистором, а также резисторами и диодами. Я думаю, что большинство этих реле управляют механизмом определения местоположения посадки, двигая двигатель вперед или назад и останавливаясь на концевом выключателе. Диоды представляют собой обратноходовые диоды, два диода последовательно подключены к каждой катушке реле для устранения индуктивного выброса, когда катушка отключена.
Плата электроники.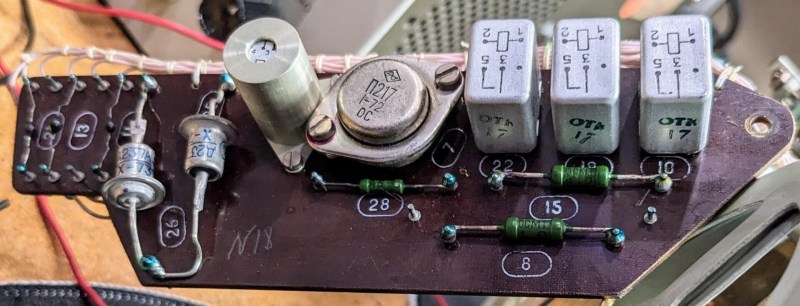
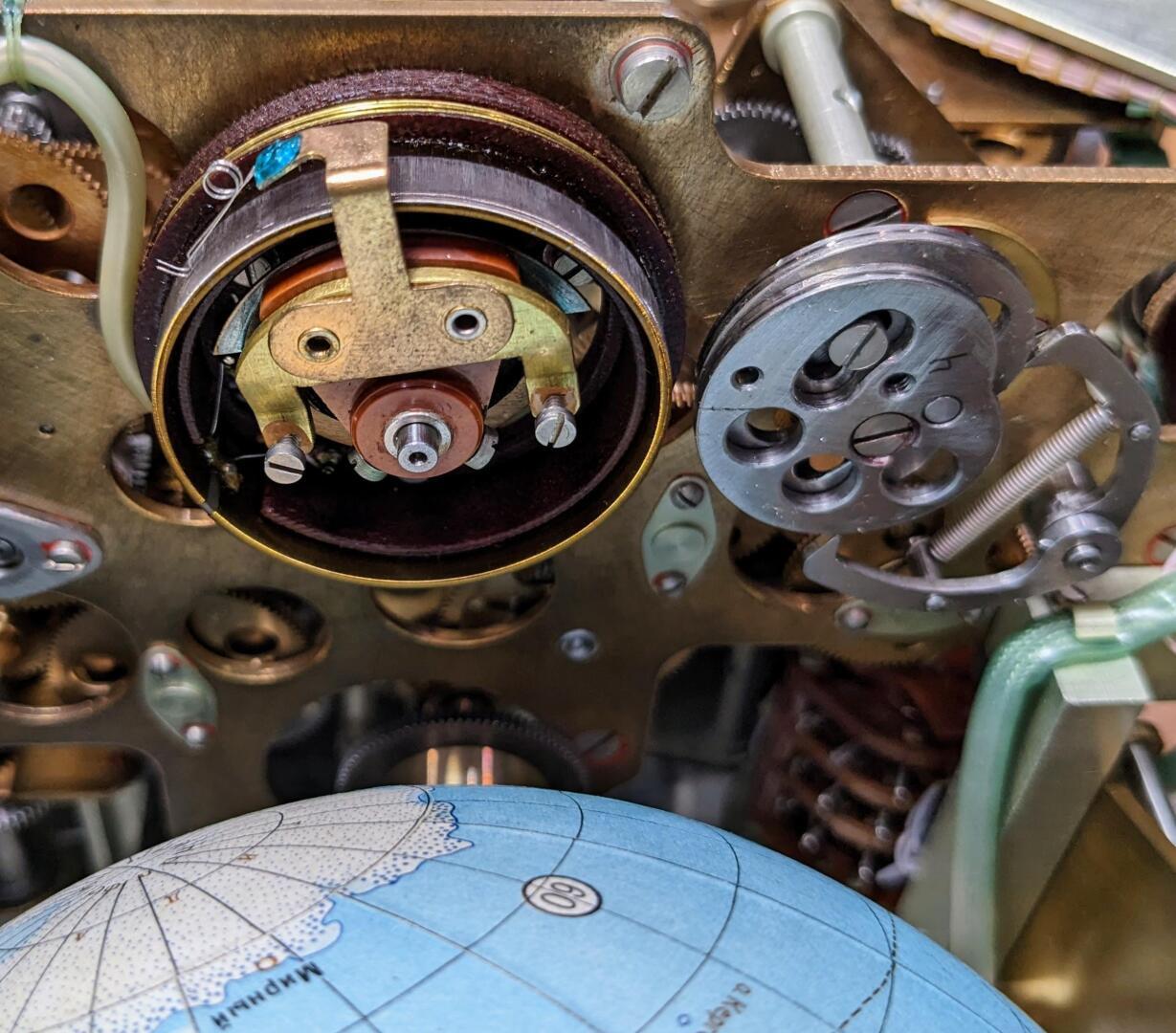
- Потенциометр на 360° (ниже) преобразует орбитальное положение космического корабля в напряжение. Источники указывают, что Глобус подает этот сигнал напряжения другим устройствам на космическом корабле. Моя теория состоит в том, что транзистор на плате электроники усиливает это напряжение, но я все еще изучаю ситуацию.
Потенциометр преобразует орбитальное положение в напряжение. Справа находится камера, которая отображает долготу. Антарктида видна на земном шаре.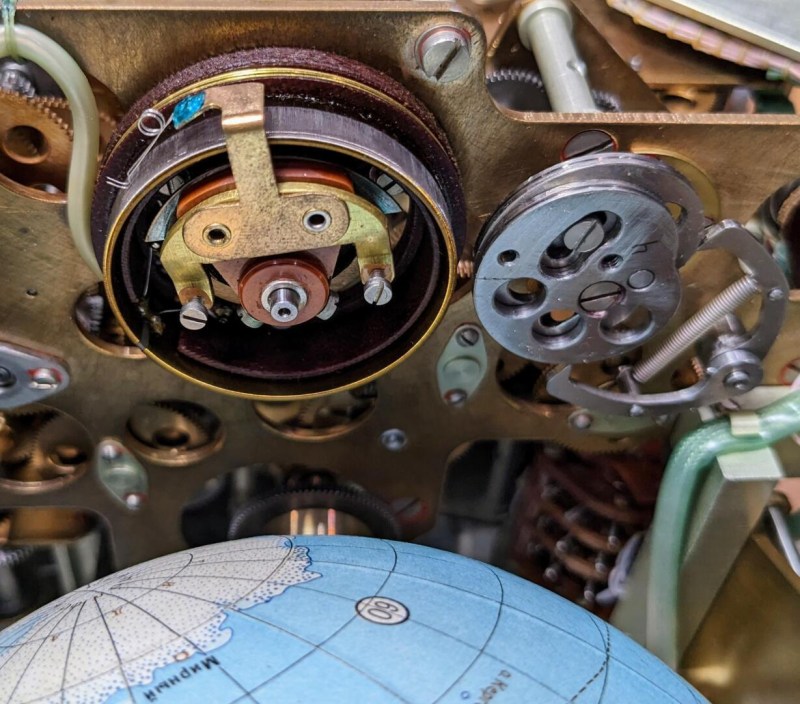
- На фотографии ниже показаны несколько жгутов проводов в Глобусе спереди и слева. Плата электроники находится спереди справа. Глобус содержит удивительное количество проводки для устройства, которое в основном механическое. Неудобно, все провода к внешнему разъему бокса (вверху слева) были перерезаны. Возможно, это было частью вывода блока из эксплуатации. Однако один из винтов на корпусе закрыт сургучной пломбой со знаками отличия, и эта сургучная пломба осталась целой. Это указывает на то, что устройство было официально повторно опломбировано после перерезания проводов, что не имеет смысла для списанного устройства.
Этот вид показывает заднюю и нижнюю часть Глобуса. Круглый разъем сзади слева обеспечивал интерфейс с остальной частью космического корабля. Все черные провода под этим разъемом были перерезаны.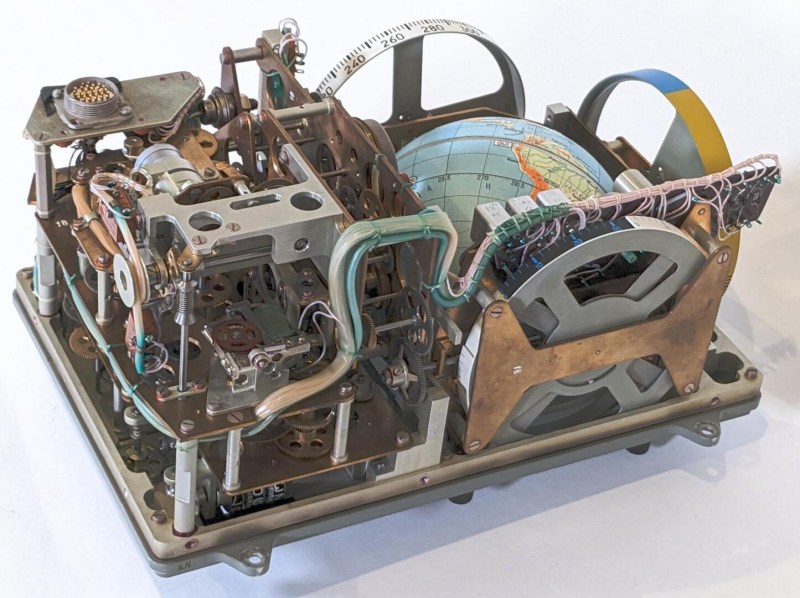
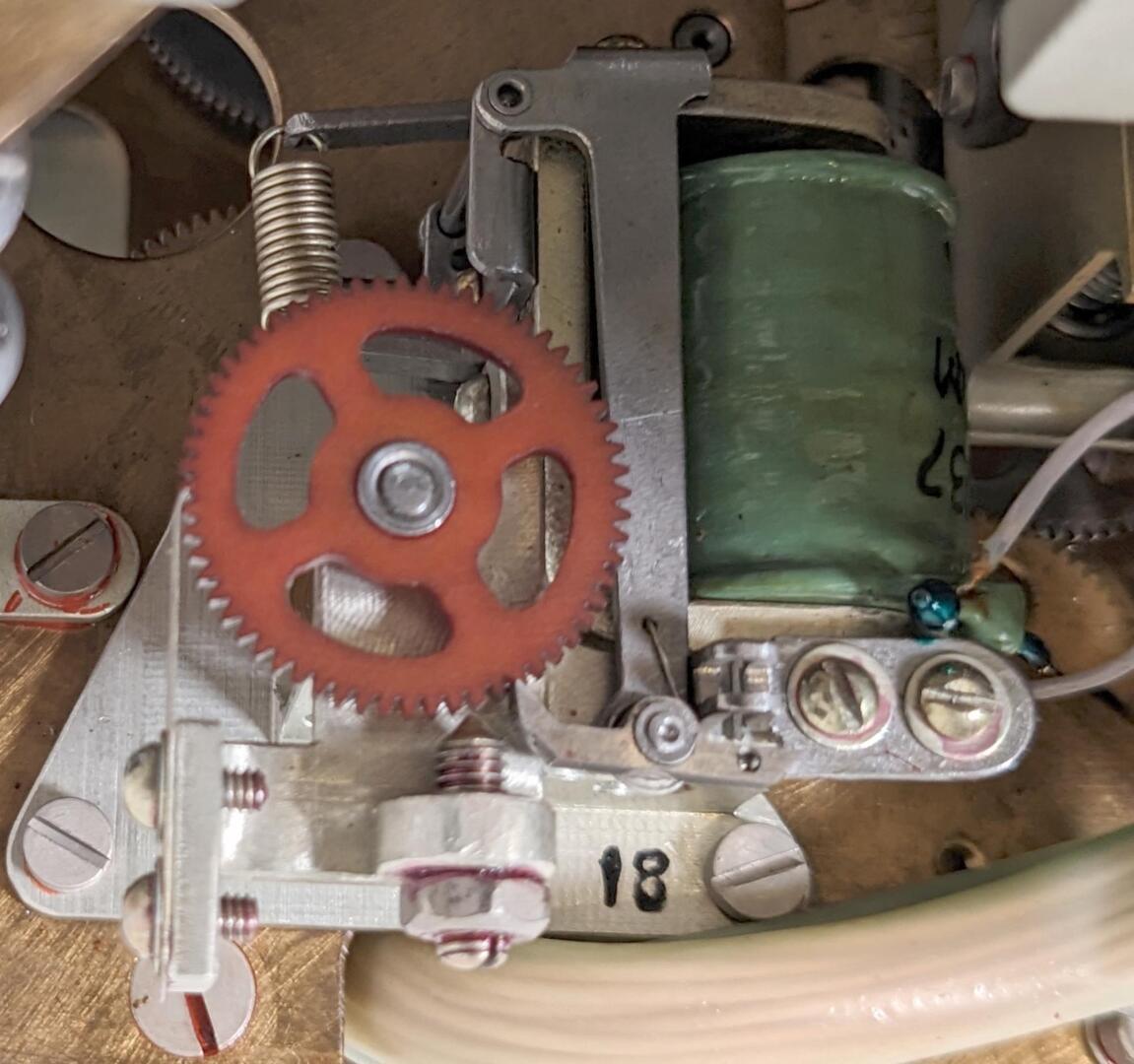
- Соленоиды привода
Устройство приводится в движение двумя соленоидами с храповым механизмом: одним для орбитального вращения и одним для вращения Земли. Эти соленоиды принимают 27-вольтовые импульсы с частотой 1 Гц. Каждый импульс заставляет соленоид продвигать шестерню на один зуб; собачка удерживает шестерню от соскальзывания назад. Эти небольшие вращения приводят в движение шестерни по всему Глобусу и приводят к крошечному движению земного шара.
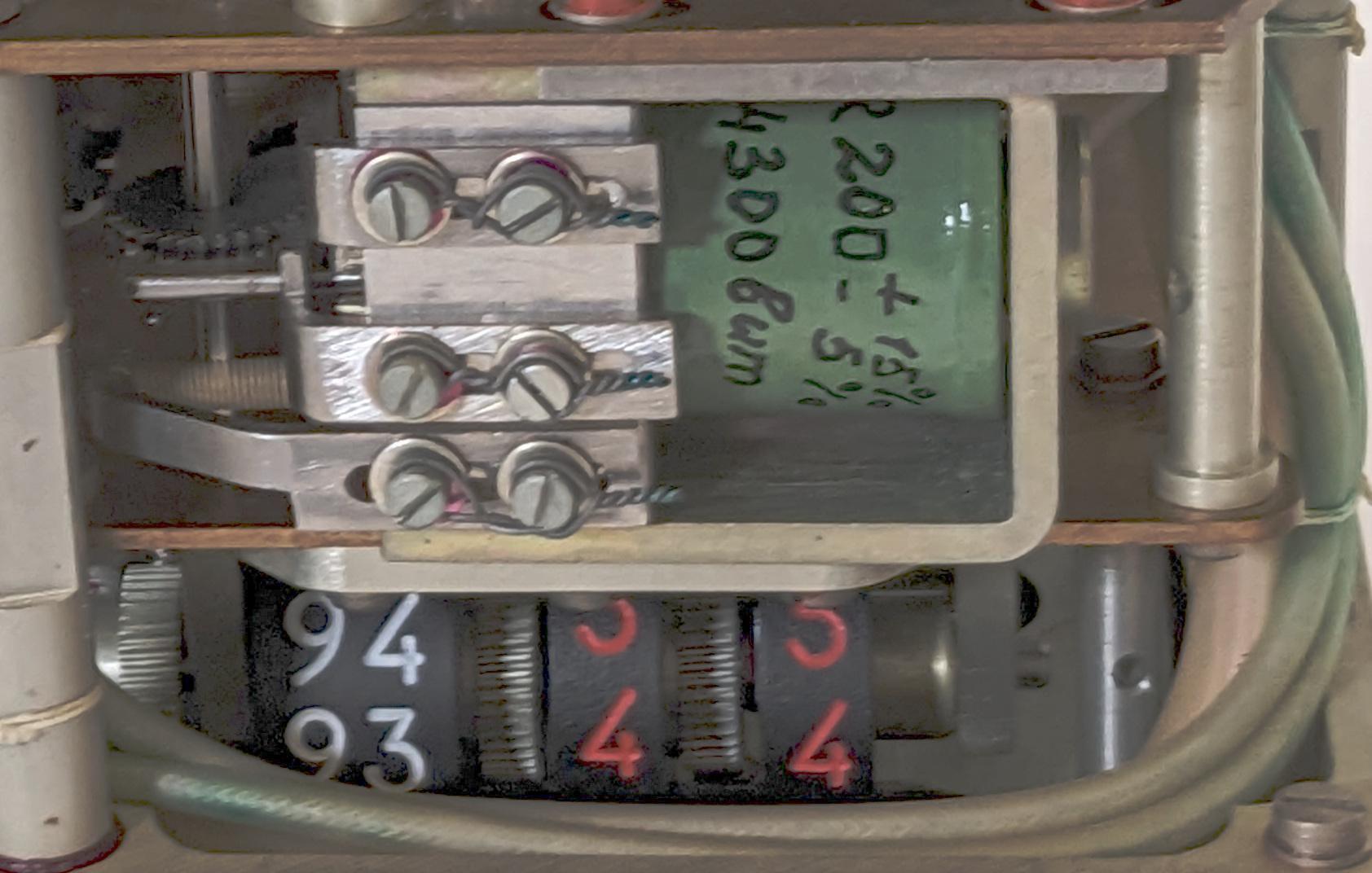
Один из приводных соленоидов в Глобуса. Колеса для индикации орбитального времени находятся внизу.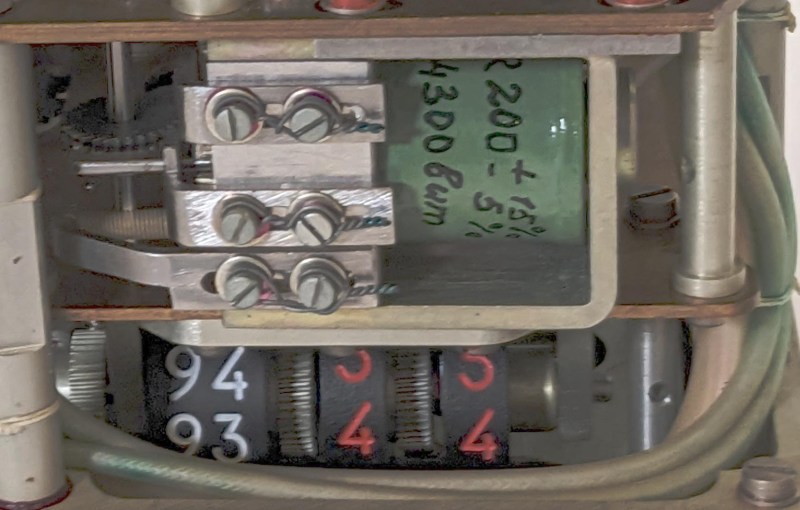
- Другой приводной соленоид в Глобусе.

- Аполлон-Союз
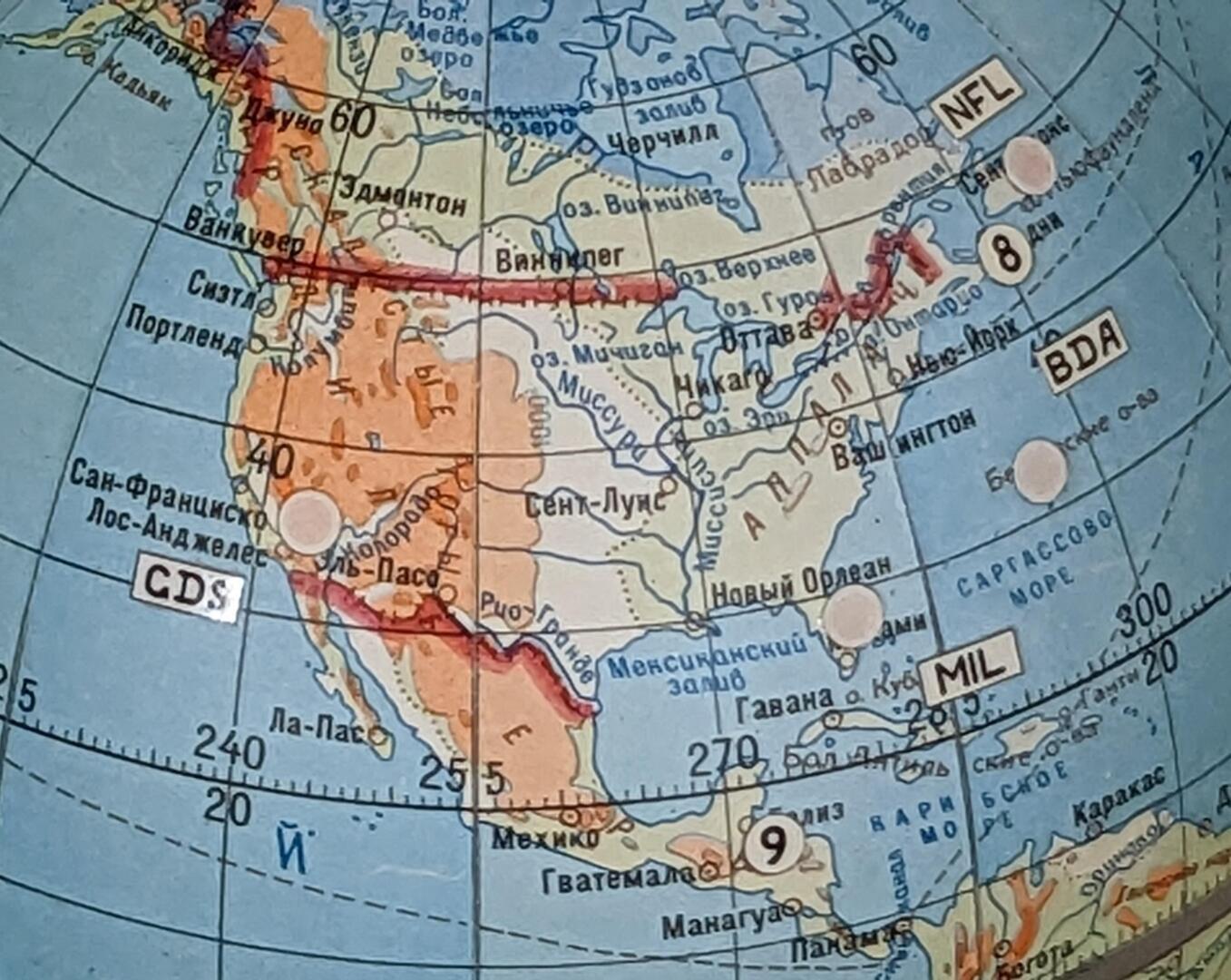
Если внимательно присмотреться к глобусу, на нем добавлено множество розовых точек, а также трехбуквенные метки латинскими символами. На фото ниже вы можете видеть GDS (Голдстоун), MIL (остров Меррит), BDA (Бермуды) и NFL (Ньюфаундленд). Это места слежения НАСА, из чего следует, что этот «Глобус» был построен для испытательного проекта «Аполлон-Союз» — миссии 1975 года, когда космический корабль «Аполлон» состыковался с капсулой «Союз».
Северная Америка, как она выглядит на земном шаре. Граница США отмечена красным. Выбор городов кажется немного случайным, например, Эль-Пасо как единственный западный город до побережья.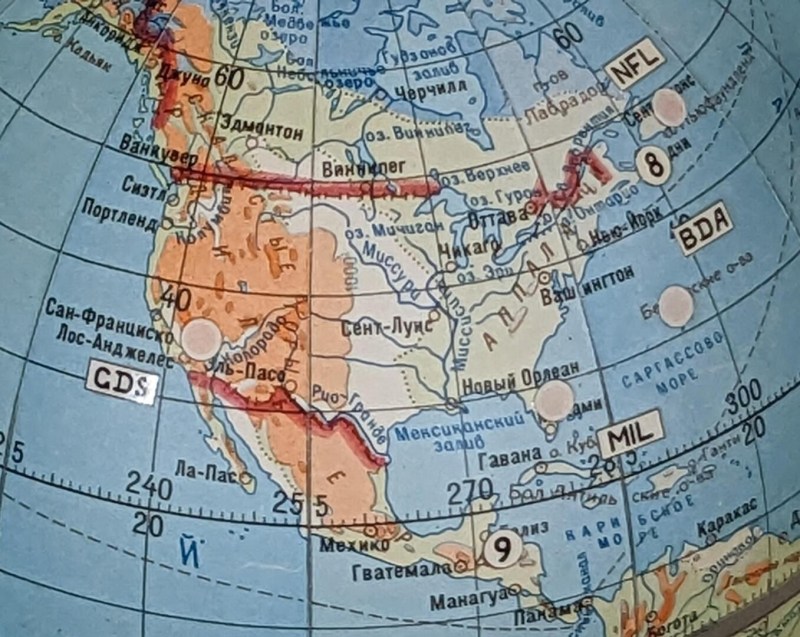
- Еще одним подтверждением связи «Аполлон-Союз» является наклейка ВАН посреди Тихого океана (не видна выше). USNS Vanguard был кораблем слежения НАСА, который использовался в программе « Аполлон» для заполнения пробелов в радиопокрытии. Это был нефтяной танкер времен Второй мировой войны, переоборудованный после войны в корабль слежения за ракетами, а затем использовавшийся для Аполлона. На фото ниже вы можете увидеть большие антенны слежения на его палубе. Во время миссии «Аполлон-Союз» «Авангард» находился в точке 25 ю.ш. 155 з.д. для миссии «Аполлон-Союз», что точно соответствовало местоположению точки ВАН на земном шаре.
USNS Vanguard с самолетом NASA C-54 над головой.
- История
У «Глобуса» долгая история, восходящая к началу советских пилотируемых космических полетов. Первая версия была проще и имела русскую аббревиатуру ИМП (IMP). Разработка ИМП началась в 1960 г. для космических полетов "Восток" (1961 г.) и "Восход" (1964 г.).
Глобус ИМП.
- Основные функции более раннего Глобуса ИМП аналогичны ИНК, показывая положение космического корабля и место посадки. В правом нижнем углу есть счетчик орбит. Для полетов Восхода вверху добавлено отображение широты и долготы. Большая ручка коррекции позволяет регулировать период обращения. Основные отличия заключаются в том, что у ИМП нет дисплея внизу для отображения солнца и тени, а также нет элемента управления для установки угла посадки. В отличие от ИНК, режим (орбита или посадочное положение) выбирался внешними переключателями, а не переключателем на устройстве.
Более сложная модель ИНК (описанная в этом блоге) создавалась для полетов кораблей «Союз», начиная с 1967 года. Она входила в состав системы отображения информации (ИДС) «Сириус». СИД «Нептун», использовавшийся на «Союз-Т» (1976 г.) и «Нептун-М» для «Союз-ТМ» (1986 г.), модернизировал большую часть консоли, но сохранил ЧЕРНИЛА «Глобус». На фото ниже показан «Глобус», установленный в правом верхнем углу консоли корабля «Союз-ТМ».
СИД "Нептун-М" для корабля "Союз-ТМ"
- Союз-ТМА (2002 г.) модернизирован до системы Нептун-МЭ, в которой использовались цифровые экраны. В частности, Глобус был заменен графическим дисплеем ниже.
Компьютерный дисплей системы индикации "Нептун-МЭ" космического корабля "Союз-ТМА". Консоли «Союз» намного проще, чем консоли «Аполлон» или «Спейс Шаттл», и построены по совершенно другим принципам конструкции.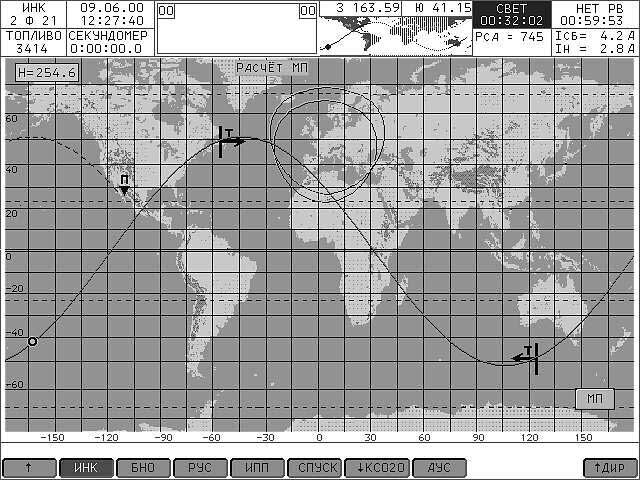
- Выводы
Глобус ИНК — замечательный механизм, аналоговый компьютер, который вычисляет орбиты с помощью сложной системы шестерен, кулачков и дифференциалов. Он предоставил космонавтам полноцветное отображение положения космического корабля с высоким разрешением, намного превосходящее то, что мог обеспечить электронный космический компьютер в 1960-х годах.
Хотя Глобус представляет собой удивительный образец механического вычисления, его функциональность ограничена. Его параметры должны быть настроены вручную: стартовое положение космического корабля, орбитальная скорость, области света/тени и угол посадки. Он не требует каких-либо внешних входных данных, таких как IMU (инерциальный измерительный блок), поэтому он не особенно точен. Наконец, он поддерживает только круговую орбиту под фиксированным углом. Хотя более современному цифровому дисплею не хватает физического очарования вращающегося земного шара, цифровое решение предоставляет гораздо больше возможностей.
Глобус без корпуса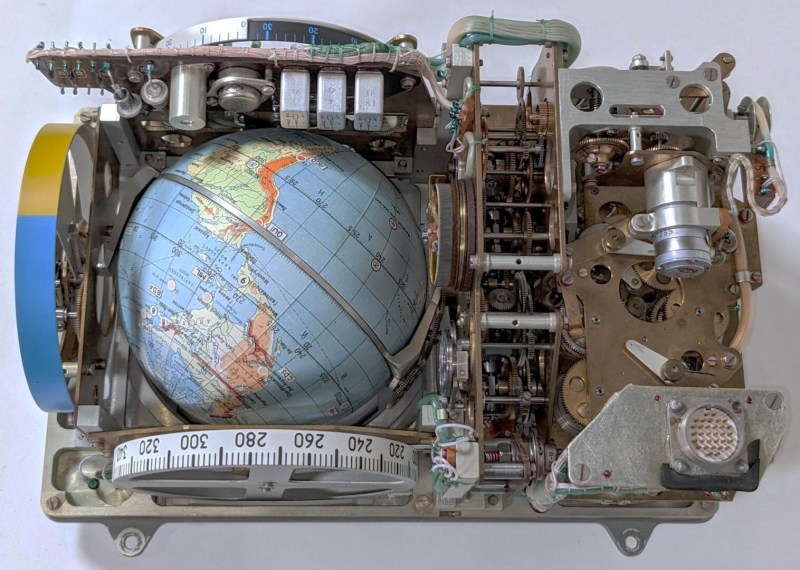






😁
1 446 просмотров